AI-Assisted Evaluation for Pilot Monitoring Training in VR-Based Flight Simulators
CDE4301 Final Report
Instructor: Professor Khoo Eng Tat
Team: Liu Yuhui (Ula) (A0266685L), Wang Yubo (A0262295Y), Zhang Yining (A0258906R), Gao Jiquan (A0258910B)
Affiliation: Singapore Airlines – NUS Digital Aviation Corp Lab
Semester: AY2025/26 Sem 2
Link to Github Repo: https://github.com/wangyubo013-blip/CDE4301-VR-401-Final-Report
Table of Contents
Abstract
This project developed two technical workstreams within an existing VR-based PM training simulator to support objective, data-driven assessment of Pilot Monitoring competency. The first improved speech recognition capability through Low-Rank Adaptation fine-tuning of a Faster-Whisper Large-v3 model, supplemented by prompt engineering and numerical normalisation, reducing word error rate on real pilot data from approximately 38% to 21%, with the largest gains concentrated on aviation-specific vocabulary. The second introduced physiological signal acquisition combining PPG-derived heart rate and galvanic skin response, validated through a MIST-style stress protocol (Dedovic et al., 2005) and preliminarily applied to an authentic VR training session, where detected stress episodes corresponded temporally with known PM-critical scenario events. Both pipelines were mapped to IATA Observable Behaviors (IATA, 2024; IATA, 2025), providing trainees with objective, time-aligned evidence of their communicative and cognitive performance to support structured self-reflection within the competency-based training framework.
1. Introduction
The Pilot Monitoring (PM) role is central to multi-crew flight safety, yet it remains one of the most difficult competencies to train and assess objectively. Unlike the Pilot Flying, whose performance is measurable through flight path deviations and control inputs, the PM's effectiveness manifests through cognitive and communicative acts — scanning instruments, detecting anomalies, issuing callouts, and escalating concerns — none of which leave direct, quantifiable traces in conventional simulator data. Current assessment frameworks, including the IATA Evidence-Based Training and Competency-Based Training and Assessment standards, define PM competency through Observable Behaviors, but evaluators must rely on memory-based, real-time observation to map trainee performance onto these criteria. Research has documented that such methods produce inconsistent evaluations across instructors and sessions, undermining the reliability that competency-based frameworks are designed to achieve (Holt, 2018).
Virtual reality flight simulation offers a scalable alternative to full-flight simulators, which cost upwards of USD 20 million and face compounding constraints from global instructor shortages projected against a demand for 650,000 new pilots by 2043 (Boeing, 2025). Regulatory bodies including the FAA and EASA have begun recognising VR-based devices for pilot training (Loft Dynamics, 2024; EASA, 2025), and studies have demonstrated comparable procedural effectiveness for monitoring-oriented tasks (Cambridge University, 2025). However, VR addresses the access problem without resolving the assessment problem: objective, automated evaluation of PM competency within VR training environments remains an open challenge that this project seeks to address.
We develop two technical workstreams integrated into an existing VR-based PM training simulator using a Busan approach scenario with embedded intentional deviations. The first workstream targets the communicative dimension of PM performance, domain-adapting a Faster-Whisper Large-v3 ASR model via Low-Rank Adaptation fine-tuning on air traffic control speech data, supplemented by prompt engineering and numerical normalisation. The second workstream introduces physiological sensing as a new modality for indexing the cognitive dimension, combining PPG-derived heart rate and galvanic skin response in a dual-sensor configuration validated through a Montreal Imaging Stress Task protocol (Dedovic et al., 2005). A threshold-based stress detection algorithm adapted from Jeroh (2018) was subsequently applied to an authentic VR training session to examine whether detected stress episodes aligned with known PM-critical scenario events.
Together, the outputs of both pipelines are mapped to IATA Observable Behaviors (IATA, 2024; IATA, 2025), providing the PM trainee with objective, time-aligned evidence of their own communicative and cognitive performance. The system is designed as a self-assessment support tool rather than an evaluation instrument, enabling trainees to reflect on their performance with reference to established competency standards.
2. Literature Review
2.1 Competency-Based Training and Observable Behaviors
The global aviation training community has progressively shifted from traditional hour-based curricula toward competency-based approaches that emphasize demonstrated performance against defined behavioral standards. IATA has been instrumental in codifying this transition through its Evidence-Based Training (EBT) framework (IATA, 2024) and accompanying Competency Assessment guidance materials (IATA, 2025), defining nine core competency areas for pilots, each operationalized through specific Observable Behaviors (OBs).
Two competency areas are particularly relevant to this project. The communication competency encompasses OBs assessable through speech analysis: OB 2.3 specifies that pilots should convey messages clearly and accurately; OB 2.7 addresses appropriate escalation of concerns; and OB 2.9 concerns adherence to standard radiotelephone phraseology. The Workload Management competency encompasses OBs assessable through physiological proxies, enabling instructors to understand not merely that a performance lapse occurred, but why it occurred in terms of the trainee's cognitive load. Kim et al. (2023) validated that decomposing broad competency areas into specific observable indicators enables more reliable and consistent assessment across evaluators, reinforcing the theoretical foundation of this approach.
Despite the conceptual maturity of competency-based frameworks, a critical implementation gap persists: current EBT assessment relies entirely on instructor observation. Research has documented that such memory-based assessment produces inconsistent evaluations across instructors and training sessions (Holt, 2018). Our two technical workstreams address this gap by generating timestamped evidence packages that augment instructor judgment while providing the objective, reproducible data that current methods lack.
2.2 Speech Recognition in Aviation
Aviation remains a difficult domain for automatic speech recognition. Air traffic and cockpit speech contain constrained phraseology, heavy use of alphanumeric identifiers, non-native accents, clipped speaking styles, and operational noise, making domain adaptation especially important. Recognition errors in aviation are not merely transcription mistakes — they may affect the recovery of runways, call signs, and procedural phrases that carry operational meaning (Wang, 2024).
A key theme in the literature is the role of aviation-specific corpora. The ATCOSIM corpus, introduced by Hofbauer et al. (2008) as approximately ten hours of non-prompted clean ATC speech with orthographic transcriptions, became an early foundational public resource for domain-specific aviation ASR, as operational speech is difficult to obtain due to privacy and institutional constraints. Later work confirmed its continued importance alongside corpora such as ATCO2, MALORCA, and ATCSpeech (Wang, 2024). For this project, ATCOSIM serves as a practical intermediate aviation domain corpus for first-stage adaptation, providing relevant exposure to aviation phraseology absent from general speech corpora.
A second major theme is domain adaptation under limited resources. Lin et al. (2021) showed that air traffic ASR can be improved by combining unsupervised pretraining with supervised transfer learning when only small amounts of transcribed data are available, supporting the view that aviation ASR should be treated as a specialized transfer learning problem. Within this setting, LoRA is especially attractive: it reduces trainable parameters by freezing the pretrained backbone and learning only low-rank update matrices, making adaptation more efficient and less prone to overfitting (Song, 2024). Recent work on LoRA-based Whisper adaptation confirms that this approach can approach or outperform full fine-tuning while requiring only a fraction of the parameters (Prasad, 2024), providing direct support for selecting LoRA as the main adaptation strategy where computational efficiency and limited data are key concerns.
Accent robustness is a further issue. A recent study found that existing ASR systems still struggle with Southeast Asian accented English in noisy ATC settings, and that region-specific datasets and accent-focused training are essential for improving performance (Wee et al., 2025). This is directly relevant as the VR pilot data include Singapore-accented English, meaning effective domain adaptation must address both phraseology and regional acoustic mismatch.
Finally, WER must be interpreted in context. Reviews of ATC ASR emphasize that misrecognizing a runway, call sign, or altitude is far more serious than misrecognizing a function word (Wang, 2024), suggesting evaluation should consider high-value vocabulary classes such as aviation terms, numbers, and alphanumeric identifiers (Pang et al., 2025). For a PM assessment system, the goal is not perfect dictation, but reliable preservation of operational meaning in safety-relevant callouts.
2.3 Physiological Sensing for Cognitive Workload
The case for physiological monitoring during pilot training is grounded in the documented consequences of undetected cognitive stress on flight safety. Stress impairs attention, slows reaction times, degrades situational awareness, and compromises decision-making. Lakshmana et al. (2025) corroborated this in a study of 372 commercial pilots, finding a significant negative relationship between perceived stress and decision-making quality. SKYbrary's OGHFA Behavioural Note on Stress and Stress Management identifies preparedness as the primary mitigating mechanism, positioning structured training as a means of cultivating competence-based confidence that regulates the stress response itself — and underscoring the need for objective real-time stress monitoring.
Galvanic skin response (GSR), or electrodermal activity (EDA), reflects sympathetic nervous system arousal through changes in skin conductance. Zhou et al. (2015) demonstrated that GSR readings significantly increase when cognitive load increases, establishing GSR as a reliable objective indicator of workload intensity. Heart rate variability (HRV) provides a complementary window: HRV decreases under cognitive load as the cardiovascular system shifts toward sympathetic dominance, providing mutual validation when combined with GSR across partially independent autonomic mechanisms.
The feasibility of combining these modalities in aviation was established by Harrivel et al. (2017) at NASA, demonstrating that real-time physiological monitoring can be successfully implemented in flight-relevant environments. More directly, Ouyang et al. (2023) achieved 96.67% accuracy predicting inattention by fusing ECG and GSR signals with a support vector machine, validating the complementary value of this dual-sensor approach.
The Montreal Imaging Stress Task (MIST), developed by Dedovic et al. (2005), was selected to validate our sensing setup. MIST combines mental arithmetic challenges with social-evaluative pressure through fabricated performance feedback, producing robust physiological stress responses that scale with graded difficulty — a prerequisite for distinguishing different levels of cognitive challenge during PM training.
For stress detection operationalization, Jeroh (2018) developed a threshold-based approach using HR and GSR baseline deviation, flagging stress when both modalities simultaneously exceed predetermined thresholds. This dual-condition requirement reduces false positives, since HR alone is susceptible to motion artifacts while GSR alone may fluctuate due to environmental factors.
2.4 Multimodal Evidence for Training Assessment
The full potential of objective PM evaluation emerges only when multiple data modalities are combined. Xu et al. (2025) developed an in-flight multimodal system capturing gaze behavior, speech, and physiological signals simultaneously, establishing that integrating multiple data streams provides richer and more reliable evidence of pilot attention and workload than any single modality. Minas et al. (2025) further demonstrated that single-modality assessment misses important cross-modal patterns: a pilot may exhibit elevated physiological stress indicators seconds before verbally escalating an anomaly, or issue appropriate callouts while physiological data reveals minimal cognitive engagement, suggesting rote execution rather than genuine situation awareness.
A significant gap remains: no existing system combines speech recognition and physiological sensing specifically for PM evaluation in VR training environments. Prior multimodal research has focused primarily on the Pilot Flying role, where flight path deviations provide objective performance metrics. The PM role lacks such clear-cut outputs — its effectiveness manifests through cognitive processes and communicative acts rather than direct aircraft control — meaning PF-oriented approaches cannot be directly transferred.
Our project addresses this gap by developing the first proof-of-concept system integrating domain-adapted speech recognition with validated physiological stress sensing for PM competency assessment. Speech data reveals what the pilot communicates and when; physiological data reveals the cognitive states that drive those communications. Speech alone cannot explain why a trainee delayed a critical callout; physiological data can reveal whether the lapse stemmed from cognitive overload or simple procedural forgetting. Conversely, physiological data alone cannot distinguish productive engagement from unproductive stress; speech provides the behavioral outcome that gives meaning to the physiological response. By combining both modalities within the IATA Observable Behavior framework, the system generates objective, transparent evidence that augments instructor judgment, addressing the assessment gap that VR alone cannot solve.
3. VR Scenario and System Overview
3.1 Busan Approach Scenario
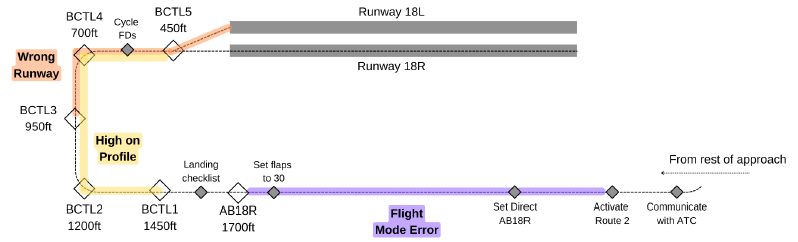
The Busan Approach scenario is a predefined VR-based landing sequence developed by the research team to simulate terminal-phase flight operations with embedded Pilot Monitoring (PM) challenges. It incorporates three intentional deviations:
- Flight Mode Error (LNAV not re-engaged)
- Wrong Runway alignment
- High on Profile
Each of them requires timely detection and verbal escalation by the PM. The scenario includes basic interactivity such as flap configuration, checklist execution, and verbal communication, while automatically correcting deviations if no intervention occurs to maintain continuity. As MCP and FMC interactions are not fully implemented, the scenario primarily evaluates monitoring and communication behaviors, and serves as the standardized test environment for collecting synchronized speech, physiological, and event data in this project.
3.2 System Architecture Overview
The system consists of two parallel processing workstreams that generate evidence for Pilot Monitoring (PM) evaluation.
In the first workstream, speech audio is processed using a Faster-Whisper automatic speech recognition (ASR) model to produce callout transcripts, which are then analyzed to assess communication-related Observable Behaviors (OBs).
In the second workstream, physiological signals — specifically heart rate (HR) and galvanic skin response (GSR) — are processed to derive stress labels, which are used to evaluate workload management OBs.
In addition, simulator event logs provide task-level ground truth, including the timing of scenario deviations and the corresponding PM responses, enabling alignment and validation of the multimodal evidence.
4. Workstream 1: Domain-Adapted Speech Recognition
4.1 Problem Statement
In the baseline pipeline, Azure Speech to Text produced a word error rate of about 48 percent on the collected VR pilot data. At this error level, many utterances are only partially intelligible, and recognition errors reduce the reliability of speech as an input modality for both scenario interaction and behavioural assessment.
This limitation affects the VR scenario at the interaction level. Because aviation-specific terms and procedural phrases are not recognized consistently, the system cannot depend fully on phrase-level verification and must instead rely partly on simplified keyword-based triggering. While this keeps the scenario functional, it reduces semantic precision and weakens the system's ability to verify whether the trainee actually produced the intended operational callout. As a result, speech-driven interaction becomes less specific and more vulnerable to false acceptance, since generic trigger words may be detected even when the operationally important content is missing or incorrectly recognized.
The issue is also important from the perspective of behavioural assessment. Within the IATA pilot competency framework, communication includes observable behaviours such as conveying messages clearly, accurately, and concisely (OB 2.3), and using appropriate escalation in communication to resolve identified deviations (OB 2.7). In pilot monitoring scenarios, these behaviours are often expressed through verbal callouts, confirmations, and escalations. However, when the transcription modality itself is highly error-prone, it becomes difficult to determine whether an incorrect transcript reflects poor pilot communication or ASR failure. This weakens the validity of transcript-based evidence for pilot monitoring assessment, especially when errors occur on operationally important aviation terms that carry much of the behavioural meaning.
Therefore, this workstream aimed to develop a domain-adapted ASR pipeline that could substantially reduce transcription error on real pilot data while better preserving operational meaning in pilot monitoring-related utterances. A target of reducing WER to below 20 percent was adopted as a practical engineering objective. More broadly, the goal was to establish a transcription pipeline that is accurate, reproducible, deployable offline, and sufficiently robust for behavioural verification in the VR training environment.
4.2 Approach Selection
We tried four potential approaches for improving speech recognition performance under domain-specific conditions, with considerations on offline capability, data availability, and implementation complexity.
- Azure Phrase List: It enables quick gains by biasing recognition with domain-specific vocabulary, but it offers only superficial adaptation, is deprecated for Unity deployment, and requires cloud connectivity, making it unsuitable for offline use.
- Azure Custom Speech: It supports deeper model customization through supervised training, but it demands large amounts of aligned audio-text data and relies on cloud infrastructure, which introduces limitations in data privacy, latency, and deployment flexibility.
- Faster-Whisper with full fine-tuning: This approach offers complete control over model adaptation and supports offline deployment, making it technically comprehensive. However, full fine-tuning of large-scale models such as Whisper large-v3 is computationally expensive, requires significant GPU resources, and poses risks of overfitting when only limited domain-specific data is available. These factors make it impractical for the current project scope.
- Faster-Whisper with Low-Rank Adaptation (LoRA): This method retains the advantages of an open-source, offline-capable system while significantly reducing training complexity. LoRA enables efficient fine-tuning by updating only a small subset of model parameters, making it well-suited for scenarios with limited data and computational resources. It also provides sufficient flexibility to incorporate domain-specific knowledge without the overhead associated with full model retraining.
Low-Rank Adaptation (LoRA) is a parameter-efficient fine-tuning method that adapts large pre-trained models by learning low-rank updates instead of modifying \(\Delta W = BA\), where \(A\) and \(B\) are low-rank matrices with rank \(r \ll \min(d, k)\). The original weights remain frozen, and only these small matrices are trained, reducing both computational cost and memory usage.
This approach is effective because task-specific adaptations typically lie in a low-dimensional subspace. As a result, LoRA achieves performance comparable to full fine-tuning while using significantly fewer trainable parameters. It also allows efficient deployment, as the learned updates can be merged with the base model for inference without additional overhead.
We then proceeded to evaluate different versions of the Faster-Whisper model in terms of VRAM usage, WER, and processing time using a test clip from the Busan Scenario. Results are summarized in the tables below:
| Whisper Model | Base Parameters | Trainable Params (LoRA) | % Trainable | Inference VRAM | Training VRAM |
|---|---|---|---|---|---|
| Tiny | 39M | ~0.3M – 0.6M | <1.5% | 1 GB | 4 GB |
| Small | 244M | ~1M – 2M | <1% | 2 GB | 8 GB |
| Medium | 769M | ~3M – 6M | <1% | 5 GB | 20 GB |
| Large-v3 | 1550M | ~6M – 12M | 0.5% | 10 GB | 40 GB |
| Model | Processing Time (s) | Corpus WER | Average UTT WER |
|---|---|---|---|
| Faster-Whisper | |||
| Tiny | 9.224 | 0.969 | 1.217 |
| Small | 9.305 | 0.594 | 0.688 |
| Medium | 6.984 | 0.480 | 0.516 |
| Large-v3 | 8.625 | 0.467 | 0.521 |
| Azure (Currently implemented) | 6.513 | 0.485 | 0.527 |
The combined WER formula used is:
\[ \mathrm{WER} = \frac{S + D + I}{N} \]
where \(S\) = total substitutions, \(D\) = total deletions, \(I\) = total insertions, \(N\) = total reference words. Corpus WER is the total WER for the test set; Average UTT WER is the mean WER per utterance.
Model selection was based on balancing recognition accuracy, computational cost, and domain adaptability. Faster-Whisper Large-v3 achieved the lowest Corpus WER (0.467), outperforming Medium (0.480), Small (0.594), and Tiny (0.969), demonstrating the strongest baseline performance without fine-tuning. Although its processing time (8.625 s) is slightly higher than Medium, accuracy is prioritized given the safety-critical nature of pilot-copilot communication.
Compared to the Azure solution (WER 0.485, 6.513 s), Large-v3 provides full transcription rather than keyword-based detection, enabling better generalization and richer outputs for analysis. Notably, it already outperforms Azure without domain adaptation. With LoRA, Large-v3 can be efficiently adapted to aviation-specific speech with minimal overhead, making it a scalable and practical choice. Fine-tuning and evaluation were conducted on AutoDL using an RTX 5090 GPU (~3 RMB/hour), offering a cost-effective and flexible environment.
4.3 Fine-Tuning Pipeline
4.3.1 Data Preparation for Training and Test
The training dataset was derived from the ATCOSIM corpus, which contains approximately 10 hours of air traffic control speech recorded at 16 kHz in mono format and accompanied by orthographic transcripts (Zuluaga-Gomez et al., 2019). For evaluation, two test sets were used. Test Set 1 consisted of the held-out 20% portion of the ATCOSIM corpus and was used to evaluate performance under an in-domain condition. Test Set 2, which is more critical for this project, consisted of real pilot-copilot communication data and was used to assess model performance in a more realistic and operationally relevant scenario.
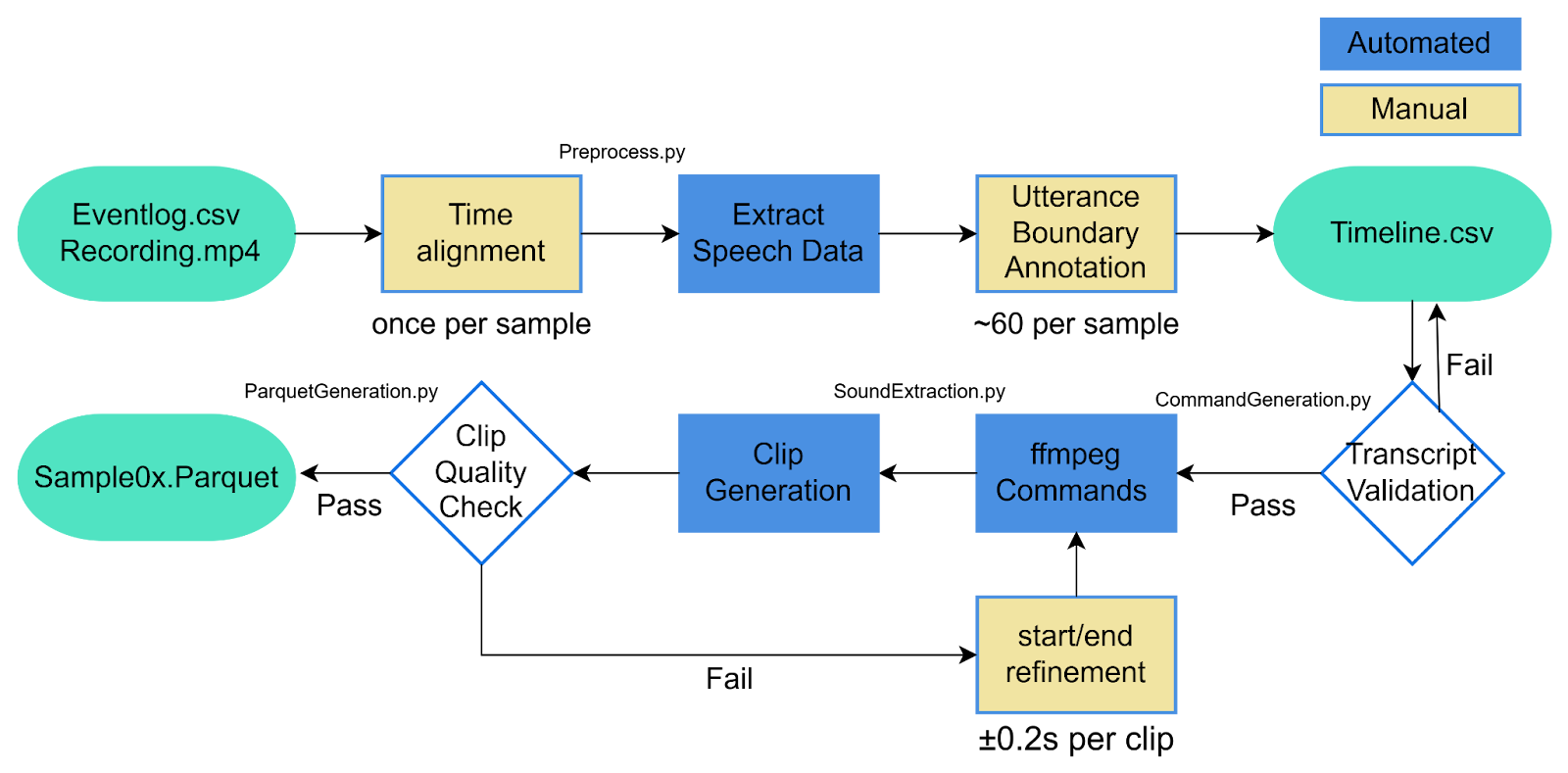
The preparation of the real pilot communication dataset required a semi-automated pipeline. The raw inputs were simulator recording files and the corresponding event logs. However, the event logs could not directly provide exact utterance boundaries, because they began from a relative zero time reference rather than absolute datetime and recorded only one timestamp for each sentence, without explicit start and end points. They could therefore serve only as approximate reference points for locating candidate utterances. Based on these references, time alignment was performed manually, after which candidate speech regions were identified for utterance boundary annotation. This process remained challenging because the recordings often contained background noise, scenario-related human voice prompts, and temporal mismatch between logged events and actual speech.
To reduce the time cost, a structured pipeline was developed to automate the downstream stages after manual annotation. Once refined start and end timestamps were recorded in a timeline file, the remaining steps — including clip generation, batch extraction using ffmpeg, transcript validation by authorized researchers, clip quality checking, and final assembly into Parquet format — were automated. Although this workflow significantly improved efficiency, dataset preparation remained labour-intensive, since the quality of the final clips depended strongly on careful manual alignment and segmentation. In practice, the uncertainty in boundary placement was typically around 0.2 s. Nevertheless, the resulting pipeline provided a practical and systematic method for converting raw simulator recordings and event log references into a structured dataset suitable for ASR evaluation and fine-tuning.
4.3.2 Model Fine-Tuning
The fine-tuning process was conducted on the jzuluaga/atcosim_corpus dataset using a LoRA-based approach. To monitor training progress, checkpoints were saved every 100 iterations, allowing systematic tracking of Word Error Rate (WER) reduction and ensuring a smooth convergence trend. A peak learning rate of \(1 \times 10^{-4}\) was adopted, which is higher than that typically used in full fine-tuning. This is appropriate for LoRA, as only a small subset of parameters is updated, enabling faster adaptation without destabilizing the pre-trained model.
Training was carried out for a total of 1600 iterations, corresponding to approximately 3.3 epochs over the dataset. The effectiveness of the fine-tuning process was evaluated using WER across training epochs:
| Stage | Baseline | Epoch 2.4 | Epoch 2.52 | Epoch 2.94 | Epoch 3.36 |
|---|---|---|---|---|---|
| WER | 9.95% | 2.464% | 2.566% | 2.09% | 1.996% |
The baseline model initially exhibited a significantly higher WER of 9.95%. After applying LoRA-based fine-tuning, the WER decreased substantially to below 2%. Although a slight fluctuation is observed at epoch 2.52, the overall trend shows a consistent reduction in WER as training progresses. The improvement begins to plateau beyond epoch 3.0, with marginal gains between epochs 2.94 and 3.36. This behavior supports the stop point at approximately 3.3 epochs (1600 iterations), as further training would yield diminishing returns while increasing the risk of overfitting.
4.3.3 Model Prompts
Prompting in Whisper-based models serves as a mechanism to inject contextual or domain-specific prior information into the decoding process. Unlike large language models (LLMs), where prompts guide high-level reasoning and content generation, prompts in speech recognition primarily influence token prediction during beam search decoding. Specifically, the initial_prompt provides a sequence of prior text tokens that bias the model toward expected vocabulary and linguistic patterns, improving recognition accuracy for domain-specific terms.
However, there exists a trade-off between contextual guidance and real-time performance. More descriptive prompts can improve the model's ability to interpret domain context (e.g., aviation scenarios), but they also increase decoding complexity and latency. In contrast, concise prompts with key vocabulary terms are more effective for on-the-spot word recognition, as they directly bias the probability distribution of candidate tokens without introducing unnecessary overhead.
A general contextual prompt:
"This is a cockpit conversation between a pilot and copilot during flight."
resulted in a WER of 27.36%. By refining the prompt to include domain-specific keywords:
"cockpit conversation between a pilot and copilot during flight, runway, downwind, altitude, speedbrake, checklist, Singapore, alt hold"
the WER improved to 26.30% for the same test case. The improvement demonstrates that incorporating targeted vocabulary is more effective than relying solely on descriptive context, aligning with the role of prompts in Whisper, where their primary function is to bias token generation rather than enable deep semantic reasoning as in LLMs.
4.4 Evaluation
4.4.1 Evaluation Standard
Model performance was evaluated using the WER metric. After model outputs were collected in a final CSV file, a custom Python evaluation script was used to read the reference and hypothesis transcripts, normalize the text, align the token sequences, and compute the corresponding substitution, deletion, and insertion counts. Based on these alignments, both utterance-level and corpus-level WER were obtained, and additional summaries were exported for later analyses at the utterance, word, and domain-category levels.
To ensure fair and consistent evaluation, text normalization was applied prior to scoring. The script converts all text to lowercase, removes punctuation, and collapses repeated spaces before tokenization, so that stylistic formatting differences do not artificially inflate the error rate. Using the same normalization and alignment procedure for all model outputs ensures that reported differences reflect recognition performance rather than inconsistent post-processing.
4.4.2 Progressive Improvement on Real Pilot Data: Word Error Rate
The performance of the model was evaluated progressively on real pilot-copilot communication data to assess the impact of fine-tuning and prompting. Three configurations were compared: the baseline Whisper Large-v3 model, Large-v3 with LoRA fine-tuning, and Large-v3 with both LoRA and prompt engineering.
The baseline model exhibits relatively high WER across all samples, ranging from 0.2548 to 0.6613, indicating limited generalization to real-world pilot speech. After applying LoRA fine-tuning, a substantial reduction in WER is observed across all samples. For example, Sample 4 improves from 0.2991 to 0.1729, and Sample 5 from 0.4353 to 0.2118, demonstrating the effectiveness of domain adaptation. Further improvements are achieved by incorporating prompt-based vocabulary guidance. The combined LoRA + prompt approach consistently yields the lowest WER across all samples, with notable gains such as Sample 4 reaching 0.1308 and Sample 5 reaching 0.1588. Overall, prompt engineering contributes an additional 5–10 percentage point reduction in WER compared to LoRA alone.
| Model | Sample 1 | Sample 2 | Sample 3 | Sample 4 | Sample 5 | Sample 6 |
|---|---|---|---|---|---|---|
| Faster-Whisper Large-v3 baseline | 0.4340 | 0.6613 | 0.2548 | 0.2991 | 0.4353 | 0.2798 |
| Large-v3 + LoRA | 0.2736 | 0.5000 | 0.2038 | 0.1729 | 0.2118 | 0.1697 |
| Large-v3 + LoRA + prompt | 0.2630 | 0.4731 | 0.1338 | 0.1308 | 0.1588 | 0.1193 |
4.4.3 Error Analysis: Improvement in Utterance-scale
Aggregate corpus WER alone does not fully reflect how recognition quality changes in practical use, because it does not show whether improvements are distributed broadly across utterances or concentrated in only a few cases. To provide a more interpretable view, utterance-level WER is compared against the Azure baseline for each model configuration. As summarized in Table 4.4b, each utterance is classified as Improved, Same, or Worsened depending on whether its utterance-level WER decreases, remains unchanged, or increases relative to the Azure baseline.
| Model | Improvement Counts | Same Counts | Worsened Counts |
|---|---|---|---|
| Azure (Baseline) | Total: 247 utterances | ||
| Large-v3 | 76 | 133 | 54 |
| LoRA | 104 | 128 | 34 |
| prompt | 127 | 117 | 19 |
Table 4.4b shows that all three Whisper-based configurations produce a net utterance-level improvement over the Azure baseline. This trend indicates that the later configurations do not merely reduce aggregate WER, but improve recognition quality across a substantial portion of the test utterances. At the same time, the nonzero worsen counts show that the gain is not uniform, and some utterances remain challenging or become less accurate under stronger domain biasing.
While the table summarizes how many utterances improved, remained unchanged, or worsened at each stage, the aggregate counts alone do not show what kinds of utterances were corrected or why some cases still deteriorated. To better interpret the stage-wise behavior, representative utterances are examined below.
Since the largest gains came from the adaptation stages, the first set of examples focuses on the transition from Azure to LoRA, which captures the main recovery of aviation phraseology from the baseline system. The second set then examines the prompt stage, where improvements are more selective and are accompanied by several cases of over-biasing or degradation.
4.4.3.1 Example Analysis for Azure to Large-v3 + LoRA
Improvement: phrase recovery
| Transcript | |
|---|---|
| Reference | Obtained runway 18R. Landing checklist complete |
| Azure | Obtain runway 1/8. Right lending track is complete |
| LoRA | obtain runway 18r landing checklist complete |
Improvement: downwind runway call recovery
| Transcript | |
|---|---|
| Reference | cleared to join downwind runway 18R. |
| Azure | cleared to join. Don't win? Runaway. Want it right? |
| LoRA | cleared to join downwind runway 18r |
These two examples show that LoRA substantially improves recognition of short but operationally important procedural phrases. In the Azure outputs, critical terms such as 18R, landing checklist, and downwind runway were either fragmented or distorted into unrelated common-language forms, which weakened the operational meaning of the utterances. After LoRA adaptation, the same phrases were recovered in forms much closer to the reference, including both the runway identifier and the associated procedural wording. This suggests that LoRA is restoring large chunks of operational phraseology that are directly relevant to pilot monitoring assessment.
Improvement: LNAV recovery
| Transcript | |
|---|---|
| Reference | LNAV Available |
| Azure | Are available. |
| LoRA | lnav available |
| Transcript | |
|---|---|
| Reference | Route 2 Activated. LNAV available. |
| Azure | route to activated LNEF available |
| LoRA | route 2 activated lnav available |
These examples are especially important because they respond directly to the problem identified in Section 4.1. In the current Unity behavior tree, the system often has to rely on the generic trigger word "available" because the critical aviation term LNAV is not recognized reliably by the baseline system. As a result, an utterance may be accepted as correct as long as the word "available" is detected, even when the operationally meaningful content is missing or mistranscribed. In the first example, Azure preserved "available" but failed to preserve LNAV, whereas LoRA recovered the complete phrase "lnav available." In the second example, Azure also distorted both "Route 2" and LNAV, while LoRA restored the intended operational phrase much more accurately. This improvement reduces the likelihood of false acceptance, because the transcript is better able to preserve the specific aviation term that should be verified, rather than only a generic trigger word.
At the same time, this improvement should not be overstated. Not all spoken instances of LNAV in the dataset are transcribed correctly even after LoRA, so the problem is reduced rather than fully solved. Nevertheless, the recovery of these examples shows that domain adaptation makes phrase-level verification more realistic than under the Azure baseline, and therefore directly improves the semantic validity of the speech-driven interaction logic.
Worsened: numeric phrase fragmentation
| Transcript | |
|---|---|
| Reference | 6000 feet checked. |
| Azure | 6000 feet checked. |
| LoRA | 6 000 feet checked |
This is not a catastrophic failure, but it shows that LoRA can introduce formatting fragmentation for numeric expressions. In a domain where numbers are operationally important, even such small degradations deserve attention.
4.4.3.2 Example Analysis for Large-v3 + LoRA to Large-v3 + LoRA + prompt
Improvement: correction of domain-specific word
| Transcript | |
|---|---|
| Reference | Speedbrake |
| LoRA | speed break |
| prompt | speedbrake |
Improvement: restoration of standard phrase
| Transcript | |
|---|---|
| Reference | Roger. Cycling the FDs |
| LoRA | hey roger cycling to fd sir |
| prompt | ok roger cycling the fds |
| Transcript | |
|---|---|
| Reference | Heading Sel. Alt Hold. |
| LoRA | heading cell auteuil |
| prompt | heading sel alt hold |
In all three cases, prompting restored the output to a form much closer to the expected cockpit phraseology. This suggests that prompting mainly acts as a contextual biasing mechanism that resolves domain-specific lexicalization and standard phrase structure when the LoRA output is already approximately aligned with the intended utterance.
The transcription of "Alt Hold" as "auteuil" is particularly notable because it resembles a phonetically plausible non-aviation lexical form rather than a random mismatch. One possible explanation is that the adapted model has absorbed bias from training data containing accent-specific patterns, causing certain short cockpit terms to drift toward acoustically similar words.
Worsened: truncation of a multi-part utterance
| Transcript | |
|---|---|
| Reference | Add 4 whites. High. pitch down a bit. |
| LoRA | and for whites high switch down a bit |
| prompt | 55 and 4 whites high |
Here, prompting appears to over-focus on part of the utterance and drops the later instruction. This suggests that for longer or less standardized utterances, prompt guidance may sometimes narrow the decoding too aggressively.
4.4.4 Error Analysis: Improvement in Word-scale
To examine this in greater detail, the analysis now moves to the word level. In particular, the numbers of substitution, deletion, and insertion errors are compared across model configurations using Azure as the common baseline in Table 4.4c. In ASR evaluation, word error rate is conventionally decomposed into substitutions, deletions, and insertions, since these three categories reveal whether improvement comes mainly from correcting wrong words, recovering missed words, or reducing spurious output. NIST evaluation plans define WER in exactly these terms. (NIST, 2020)
| Model (change vs. baseline) | Substitution | Deletion | Insertion |
|---|---|---|---|
| Azure (baseline) | 295 | 52 | 152 |
| Large-v3 | −44 | −21 | −29 |
| LoRA | −123 | −25 | −83 |
| prompt | −157 | −29 | −91 |
All Whisper-based configurations reduce errors across all three categories relative to Azure. The largest absolute reduction occurs in substitutions, indicating that the main gain comes from improving word identity rather than only suppressing extra words or recovering omitted ones. This is consistent with domain adaptation research showing that ASR often degrades domain-specific speech and benefits substantially from adaptation toward in-domain vocabulary and phrasing.
The following 3 subsections cover example analysis in word-scale, analysis based on aviation categorization and analysis on persistent errors to provide further insights.
4.4.4.1 Word-level Analysis: Key Aviation Terms
This subsection examines which specific words contribute most to the improvement. Table 4.4d highlights a set of recurrent words that are both relatively frequent in the reference transcripts and substantially better recognized by the later models. These words can be grouped into recurrent procedural terms, compact avionics or control terms, and runway identifiers.
| Word | Reference | Azure (Baseline) | LoRA | Prompt | Reduced Error Rate |
|---|---|---|---|---|---|
| landing | 31 | 17 | 7 | 7 | 0.323 |
| flaps | 27 | 14 | 1 | 2 | 0.444 |
| checklist | 15 | 7 | 4 | 4 | 0.267 |
| joining | 14 | 5 | 2 | 2 | 0.214 |
| 18r | 29 | 29 | 2 | 8 | 0.724 |
| downwind | 14 | 7 | 5 | 1 | 0.429 |
| sight | 13 | 13 | 5 | 3 | 0.769 |
| lnav | 7 | 7 | 4 | 2 | 0.714 |
| alt | 11 | 11 | 8 | 0 | 1.0 |
| hold | 11 | 8 | 5 | 0 | 0.727 |
| sel | 8 | 8 | 8 | 1 | 0.875 |
| speedbrake(s) | 11 | 11 | 11 | 1 | 0.909 |
The analysis reveals three behavioral groups. First, words whose main improvement occurs at the LoRA stage (landing, flaps, checklist, joining, 18r) show that domain adaptation captures much of the relevant vocabulary structure. For example, the error count for flaps drops from 14 in Azure to 1 under LoRA, with only a slight increase to 2 after prompting. Similarly, 18r improves dramatically from 29 Azure errors to only 2 under LoRA, although prompting later increases the error count to 8. These cases suggest that LoRA is the main driver of improvement for many frequent operational terms and identifiers, indicating that domain adaptation already captures much of the relevant vocabulary structure.
Second, words that improve progressively across both stages (downwind, sight, lnav) show that prompting adds useful contextual biasing for words that remain partially unstable after adaptation. For example, downwind improves from 7 Azure errors to 5 under LoRA and then further to 1 after prompting, while lnav improves from 7 to 4 and then to 2. This pattern suggests that LoRA provides an initial domain adaptation benefit, but prompting can still add useful contextual biasing for words that remain partially unstable after adaptation.
Third, words that remain difficult for both Azure and LoRA but are corrected effectively after prompting (alt, hold, sel, speedbrake) indicate that prompting is particularly effective for short, compact aviation terms that may still be decoded into phonetically similar but nonstandard forms after LoRA. Among these, speedbrake(s) is especially notable: it appears 11 times and remains wrong in all 11 cases under both Azure and LoRA, but the error count drops to 1 after prompting. Sel shows a similar trend, remaining completely unresolved under LoRA but improving from 8 errors to 1 after prompting.
Overall, this behavior-based grouping shows more clearly that LoRA and prompting contribute differently: LoRA provides the main improvement for many frequent operational words, while prompting is most valuable for residual hard cases, especially short domain-specific tokens that remain difficult after adaptation.
4.4.4.2 Word Error Analysis in Aviation-related Categorization
This subsection groups reference tokens into aviation-specific and non-aviation categories using the word list in List 4.4e and compares their error behavior across model configurations. The results are summarized in Table 4.4f. This categorization allows the improvement to be interpreted not only in terms of how many words are corrected, but also in terms of whether the corrected words are the ones that matter most for cockpit communication and pilot monitoring assessment.
"AVIATION_TERMS = {"lnav", "vnav", "fms", "cdu", "fcu", "ils", "vor", "loc", "glideslope", "autopilot", "autothrottle", "thrust", "speedbrake", "spoiler", "flaps","checklist", "landing", "gear", "runway", "tower", "downwind", "captain","roger", "busan", "singapore", "route", "direct", "activate", "activated","available", "green", "light", "clearance", "altitude", "heading","exterior", "below", "line", "obtained", "obtain","18r", "ab18r", "616", "700", "30", "2","pitch", "high", "whites", "check"} "
List 4.4e. Aviation related words included in the test dataset
| Category | Aviation-specific | Non-aviation | Total |
|---|---|---|---|
| Reference Count | 535 | 518 | 1053 |
| Azure Error Count | 185 | 162 | 347 |
| LoRA Error Count | 84 | 115 | 199 |
| Prompt Error Count | 79 | 82 | 161 |
| Azure Error Rate | 0.3458 | 0.3127 | 0.3295 |
| LoRA Error Rate | 0.1570 | 0.2220 | 0.1890 |
| Prompt Error Rate | 0.1476 | 0.1583 | 0.1528 |
| Absolute Error Rate Reduction | 0.1981 | 0.1544 | 0.1766 |
The later models provide stronger gains on aviation-specific vocabulary than on non-aviation words. This is an important result, because the main objective of the ASR improvement is not simply better general transcription, but better recognition of operationally meaningful cockpit terms. The larger reduction on aviation-specific words indicates that domain adaptation and prompting are aligned with the actual needs of the task.
Another important observation is that aviation-related words are harder for the baseline system, yet they benefit more strongly from the later configurations. This suggests that the added domain knowledge is effective precisely where the baseline is weakest. In practical terms, the improvement is therefore not only quantitative, but also task-relevant: the models are improving most on the words that are more critical for pilot monitoring assessment and phraseology checking.
4.4.4.3 Persistent Word Error Analysis
This subsection examines words that remain difficult in the final prompted configuration, in order to identify the residual weaknesses of the ASR system after domain adaptation and prompting.
| Word | Reference | Azure (Baseline) | LoRA | Prompt | Reduced Error Rate |
|---|---|---|---|---|---|
| singapore | 17 | 1 | 0 | 3 | −0.118 |
| exterior | 9 | 2 | 3 | 3 | -0.111 |
| "616" | 16 | 3 | 1 | 3 | 0 |
| obtain | 8 | 6 | 8 | 6 | 0 |
Only a small number of words remain unresolved in the final model. These residual cases suggest three main patterns: context-dependent words (exterior, obtain) that do not benefit clearly from domain biasing; already-stable tokens (singapore) where stronger biasing may slightly disturb rather than improve recognition; and short numeric or identifier-like tokens (616) that remain fragile across stages. These residual errors do not change the conclusion that the final system is substantially better than the baseline, but help identify where further refinement is still needed.
4.5 Discussion
The results show that the proposed domain-adapted ASR pipeline improves the practical usefulness of speech recognition for the VR pilot monitoring task, not only in aggregate WER but also in the preservation of operational meaning. The strongest evidence comes from the word-level and utterance-level analyses together. At the utterance level, the later configurations improve substantially more cases than they worsen relative to the Azure baseline. At the word level, the largest reduction occurs in substitution errors, which means the main gain is in recovering the correct words rather than merely suppressing extra output or filling in omitted tokens. This is important because, in the present application, many critical failures arise when aviation-relevant words are transcribed into phonetically similar but operationally incorrect alternatives.
A more important observation is that the improvement is concentrated on aviation-specific vocabulary rather than being limited to general transcription fluency. The later models show stronger gains on runway identifiers, flight mode terms, checklist-related words, and other cockpit expressions that are directly relevant to behavioural assessment. This directly addresses the two practical concerns raised in the problem statement. First, the transcript becomes a more faithful representation of what the PM actually said. Second, better preservation of aviation-critical phrases makes it more realistic to move beyond coarse keyword triggering toward more specific phrase-level verification. In that sense, the improvement is not only numerical — it strengthens the semantic validity of speech as an assessment modality in the VR scenario.
At the same time, the remaining errors show that the problem is not fully solved. Some difficult words persist even in the final prompted model, especially short identifiers, certain numeric tokens, and context-dependent words that do not benefit strongly from the current adaptation strategy. In addition, high error in some samples should not be interpreted only as model weakness, since part of the difficulty may also come from speaker clarity, accent variation, or acoustic ambiguity in the source speech. The current work should therefore be understood as a substantial but still incomplete improvement. Its main contribution is that it establishes a reproducible and extensible pipeline for data preparation, fine-tuning, and evaluation, while also showing that domain adaptation can improve not just recognition accuracy, but the operational usefulness of ASR for pilot monitoring.
5. Workstream 2: Physiological Stress Sensing
5.1 Problem Statement
Pilot Monitoring (PM) performance lapses frequently stem from cognitive overload or elevated stress levels, yet these internal states remain fundamentally invisible to instructors during training sessions. Unlike overt errors in aircraft handling, which produce observable deviations in flight parameters, the cognitive and affective processes underlying PM failures — such as attentional narrowing, working memory saturation, or stress-induced vigilance decrements — leave no external trace until a monitoring error has already occurred (Mumaw et al., 2021; Dismukes & Berman, 2021). This invisibility poses a critical challenge for competency-based training frameworks, where instructors are expected to assess trainee performance against Observable Behaviors yet lack direct access to the internal states that drive those behaviors. Consequently, there is a clear need for objective physiological proxies capable of indexing cognitive workload and stress in real time during VR-based PM training. Research has established that physiological signals such as heart rate variability and galvanic skin response reflect sympathetic nervous system activation associated with cognitive load and stress (Zhou et al., 2015; Harrivel et al., 2017), offering a potential pathway to make the invisible visible. However, before such physiological sensing can be meaningfully integrated into PM evaluation within the VR training environment, the sensor configuration and detection methodology must first be validated under controlled experimental conditions that reliably induce graded levels of cognitive stress. This validation requirement motivates the MIST-based experimental design described in subsequent sections, which serves to establish the feasibility and sensitivity of our physiological sensing approach prior to its application in authentic PM training scenarios.
5.2 Hardware Selection
Sensor selection was governed by four criteria: sufficient sampling rate for HR and GSR trend analysis, suitable data collection methodology, non-intrusiveness within a VR headset setup, and cost-effectiveness appropriate for a proof-of-concept system.
For cardiac sensing, the BMD 101 was initially evaluated in two electrode configurations. The first required participants to grip two handheld electrodes to complete the ECG circuit. Bench testing revealed that accurate waveforms were only produced when hands were held close to the chest; as hands moved away — as would naturally occur during keyboard interaction or simulator control inputs — signal anomalies increased markedly due to lead impedance and motion-induced baseline wander. More fundamentally, both hands being occupied by electrodes rendered the setup incompatible with MIST data collection and VR flight training. This configuration was therefore rejected on both signal quality and usability grounds.

The second BMD 101 configuration used adhesive chest patch electrodes, which decoupled cardiac sensing from hand use and produced stable ECG signals in bench testing. However, two significant drawbacks limited its suitability. First, chest electrode placement was reported as physically uncomfortable, particularly when worn with a VR headset harness — consistent with prior research noting that additional chest-worn equipment can affect comfort and immersion during VR sessions (Gruden et al., 2025; Ozaki et al., 2022). Second, and more importantly, chest electrode placement raises meaningful concerns regarding comfort and privacy for female pilots, a consideration that cannot be overlooked in a training system intended for a diverse pilot population.
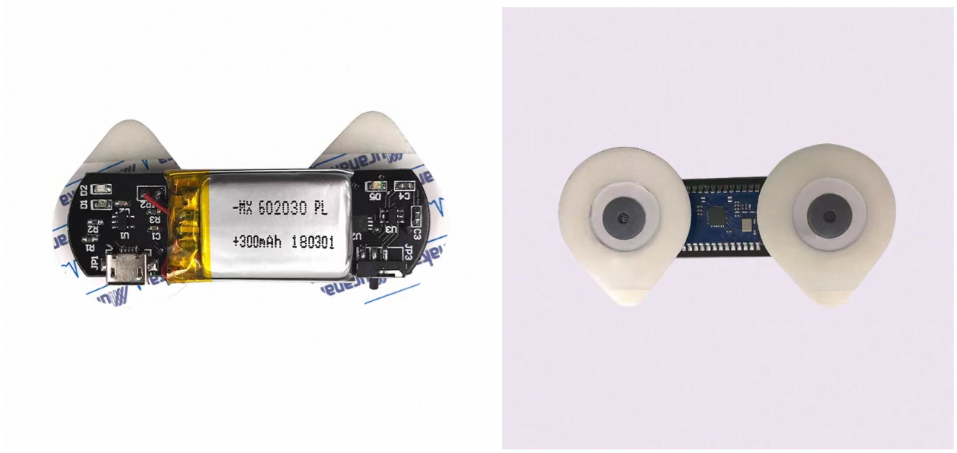
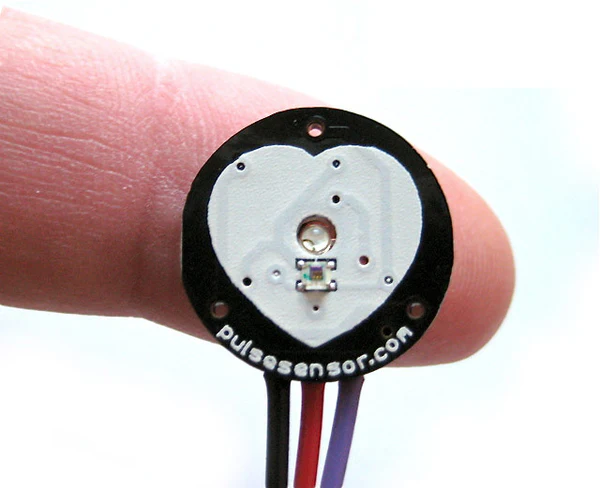
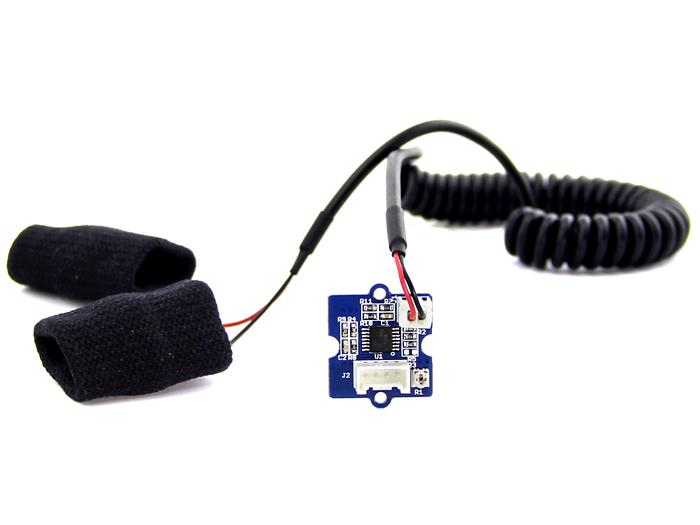
These limitations led to the adoption of the PulseSensor, a photoplethysmography (PPG)-based module. PPG operates by illuminating the skin with an LED and measuring light absorption variation caused by pulsatile blood volume changes. Fingertip placement was evaluated but introduced high-frequency motion artefacts during keyboard or mouse interaction, as the motion artifact frequency range (0.01–10 Hz) overlaps with the main PPG frequency band (0.5–5 Hz), distorting the signal (Park et al., 2022; Jain & Tiwari, 2021). Earlobe placement eliminated this problem entirely: the site is unaffected by hand movements, requires no adhesive, and is unobtrusive within a VR headset setup. Earlobes are far less vulnerable to motion artifacts than other extremities (Castaneda et al., 2018), and comparative studies have shown no significant difference between average heart rate readings from PPG and ECG under controlled conditions (Weiler et al., 2017). Heart rate was derived from the PPG waveform by detecting inter-pulse intervals on a per-second basis, and the earlobe PulseSensor configuration was adopted as the primary cardiac sensing modality.
Galvanic Skin Response (GSR) was measured using the Grove GSR v1.2 sensor connected to an Arduino Uno. GSR reflects sympathetic nervous system arousal and has been validated as a reliable objective indicator of cognitive load (Shi et al., 2007; Nourbakhsh et al., 2017), and is recognized as one of the best discriminative signals for stress detection alongside heart rate (Posada-Quintero & Chon, 2020). The sensor sampled at 5 Hz, which exceeds the minimum requirement for capturing both tonic (0.010–0.033 Hz) and phasic (0.08–0.33 Hz) GSR components associated with stress responses (Boucsein, 2012; Cho et al., 2017). The Arduino Uno platform was selected for data acquisition given its established use across biosensing applications and its suitability for proof-of-concept physiological sensing systems (Eze et al., 2025; Sugathan et al., 2013). Both PPG and GSR streams were timestamped to the system clock to enable post-hoc synchronisation with MIST task event logs and, subsequently, simulator scenario event logs.
5.3 Data Collection and Processing
Collection
Physiological data and task event data were collected through two synchronized streams using custom Python scripts. HR and GSR signals were acquired via an Arduino Uno connected to the PulseSensor and Grove GSR v1.2 sensor, transmitted over a serial connection at 9600 baud. A dedicated data collection script (Data_Collect.py) logged each sample to a timestamped CSV file at 5 Hz, with each record including a Beijing-timezone timestamp, instantaneous heart rate in BPM, and raw GSR sensor value. The script implemented real-time data validation, discarded malformed packets, and continuously flushed data to disk to prevent loss from unexpected termination.
Concurrently, the MIST application generated a comprehensive event log recording, for each trial, participant ID, absolute timestamp, difficulty level, event type, response correctness, reaction time, and cumulative accuracy. This fine-grained logging enabled precise post-hoc alignment between physiological responses and specific task demands. Both streams were timestamped to the system clock to enable synchronization during analysis. GSR values below 20 were flagged as sensor contact anomalies and excluded, and both HR and GSR streams were aggregated to per-second means to smooth transient fluctuations while preserving temporal resolution for stress detection.
Processing
All processing was implemented in Python. During baseline acquisition, each participant sat quietly for five minutes while sensors recorded HR and GSR. The most stable segment of each participant's resting recording was selected, and the arithmetic mean over that segment served as the individual's personal baseline for all subsequent percentage-change calculations.
For MIST experiment data, a three-stage cleaning pipeline was applied. First, temporal trimming aligned the sensor recording to the experiment duration using EXPERIMENT_START and EXPERIMENT_END timestamps, removing on average approximately 30% of raw data per participant that fell outside this window. Second, HR artifact removal identified PPG motion artifacts using a physiological-range threshold filter: HR values exceeding 150 bpm were flagged as artifact cores, with each cluster expanded bidirectionally to capture ramp-up and ramp-down shoulders; flagged samples were set to invalid rather than interpolated, preserving data integrity. This approach follows the range-filter and stepwise outlier rejection frameworks described by Altini (2017) and Matsumura et al. (2014), with removal rates ranging from 0% to 6.2% across participants. Third, adaptive GSR cleaning diagnosed signal noise type by computing the sign-change rate and relative jump ratio of consecutive samples; when thresholds indicating high-frequency zigzag oscillation were exceeded, a median filter with kernel size 5 was applied to suppress noise while preserving slow tonic drift, following BIOPAC's EDA analysis guidelines and the wavelet-based artifact removal methodology of Hernandez et al. (2018). Isolated single-sample spikes deviating more than four standard deviations from neighboring medians were subsequently replaced with that median value. The resulting cleaned dataset — with artifact-free HR and smoothed GSR aligned to per-level MIST event markers — formed the basis for all subsequent stress detection analysis.
5.4 MIST-Style Stress Validation Experiment
5.4.1 Why MIST
The Montreal Imaging Stress Task (MIST) was selected as the validation paradigm for our physiological sensing setup due to its well-established ability to induce reliable and graded stress responses under controlled laboratory conditions. Originally developed by Dedovic et al. (2005), MIST combines mental arithmetic challenges with social-evaluative pressure — specifically, performance feedback relative to a fabricated group average — to engage both cognitive load and psychosocial stress pathways. This dual mechanism has been shown to produce robust physiological stress responses, including elevated heart rate and decreased skin conductance, that are detectable through peripheral sensing modalities. The paradigm's graded difficulty structure is particularly advantageous for our purposes, as it enables systematic examination of whether our sensor configuration and threshold-based detection algorithm can discriminate between different stress states. Critically, validating the sensing system under controlled MIST conditions — where stress induction is experimentally assured — provides the necessary foundation before applying the same methodology to authentic PM training scenarios, where stress occurrence is less predictable and confounded by task-specific factors.
5.4.2 Protocol
The experiment followed a three-phase structure designed to capture baseline physiology, induce graded cognitive stress, and observe post-task recovery.
Phase 1: Relaxation Baseline (5 minutes). Participants were seated comfortably in a quiet room with the PPG sensor attached to the earlobe and GSR electrodes placed on the index and middle fingers of the non-dominant hand. They were instructed to relax, remain still, and refrain from speaking. HR and GSR data collected during this phase established individual baseline values against which subsequent stress-induced deviations were measured.
Phase 2: Graded Arithmetic Task (10 minutes total). Participants completed five difficulty levels, each lasting 2 minutes, for a total task duration of 10 minutes. Each trial presented a mental arithmetic problem on screen, and participants had 10 seconds to select a single-digit answer (0–9) using an on-screen button interface. Throughout the task phase, participants received continuous performance feedback displaying their cumulative accuracy relative to a stated "average target: 90%," which is a social-evaluative manipulation designed to amplify stress by implying subpar performance. The five difficulty levels were structured as follows:
| Level | Operands | Operations | Example |
|---|---|---|---|
| 1 | 2 single-digit | +/− | 7 + 2 − 2 = ? |
| 2 | 3 single-digit | +/− | 5 + 4 − 2 = ? |
| 3 | 3–4 (up to 2 double-digit) | +/− | 35 − 44 + 49 = ? |
| 4 | 3–4 (up to 2 double-digit) | ×/÷ | 15 × 3 − 38 = ? |
| 5 | 4 (up to 2 digits) | ×/÷/+/− | 12 × 6 + 9 − … = ? |
All arithmetic problems were procedurally generated by the MIST application to ensure answer validity (integer results between 0 and 9) while maintaining appropriate difficulty progression. The 10-second response window, combined with increasing computational complexity, created escalating time pressure across levels.
Phase 3: Recovery (3 minutes). Following the final arithmetic level, participants remained seated quietly while physiological recording continued. This phase captured the return of HR and GSR toward baseline levels, providing additional validation that observed deviations during Phase 2 were task-induced rather than artifacts of sensor drift or environmental factors.
The MIST event log recorded timestamps for each question onset, participant response, timeout event, and level transition, enabling precise temporal alignment with the continuous physiological data stream for subsequent analysis.
5.4.3 Stress Detection Rule
The stress detection algorithm was adapted from the threshold-based approach proposed by Jeroh (2018), which combines heart rate and galvanic skin response deviations from individual baselines to identify stress episodes. Specifically, a stress state is flagged as TRUE when both of the following conditions are simultaneously satisfied:
- HR condition: Current heart rate exceeds baseline by more than 12 bpm (\(\text{HR} > \text{baseline} + 12\) bpm)
- GSR condition: Current GSR value falls below baseline by more than 45 units (\(\text{GSR} < \text{baseline} - 45\) units)
The rationale for requiring dual-condition satisfaction is to reduce false positives that would arise from single-modality detection. Heart rate alone is susceptible to motion artifacts — physical movement during keyboard or mouse interaction can transiently elevate HR without reflecting genuine cognitive stress. Conversely, GSR alone may fluctuate due to environmental factors such as ambient temperature changes or transient variations in skin-electrode contact quality. By requiring concurrent deviation in both physiological channels, the algorithm achieves greater specificity for detecting authentic stress responses driven by sympathetic nervous system activation.
However, beyond binary stress classification, a key objective of the MIST validation experiment was to characterize the graded relationship between cognitive load intensity and physiological response magnitude. Rather than merely determining whether a trainee is stressed or not stressed during PM training, our longer-term goal is to quantify the degree of stress experienced — information that could help instructors understand not only that a performance lapse occurred, but why it occurred and how severely the trainee was challenged. The five-level MIST structure was therefore designed to systematically examine whether HR elevation and GSR suppression scale proportionally with increasing task difficulty. Establishing this dose-response relationship under controlled conditions provides the empirical foundation for interpreting physiological signals in authentic PM scenarios, where cognitive load varies continuously and unpredictably across different phases of flight.
5.5 Results
5.5.1 MIST Stress Response
Five participants (A–E) completed the five-level MIST protocol. All five exhibited elevated HR and decreased GSR relative to their personal baselines throughout the experiment, consistent with sympathetic nervous system activation under cognitive stress. Task accuracy ranged from 92.6% (Subject C) to 98.3% (Subject D), confirming genuine engagement across all difficulty levels.
Heart rate percentage change relative to each participant's personal baseline rose progressively across the five MIST difficulty levels. All five participants demonstrated a positive trend, with group mean ΔHR% rising from +11.4% at Level 1 to +22.4% at Level 5. The upward trajectory was consistent across individuals, though the magnitude of response varied — Subject D exhibited the strongest HR reactivity (peaking at +30.1% at Level 4), while Subject B showed the most modest increase (+15.2% at Level 5). Minor non-monotonic fluctuations were observed in several participants (e.g., Subject B's transient dip at Level 4, Subject A's slight decline at Level 5), which are consistent with known short-term adaptation effects during sustained cognitive tasks.
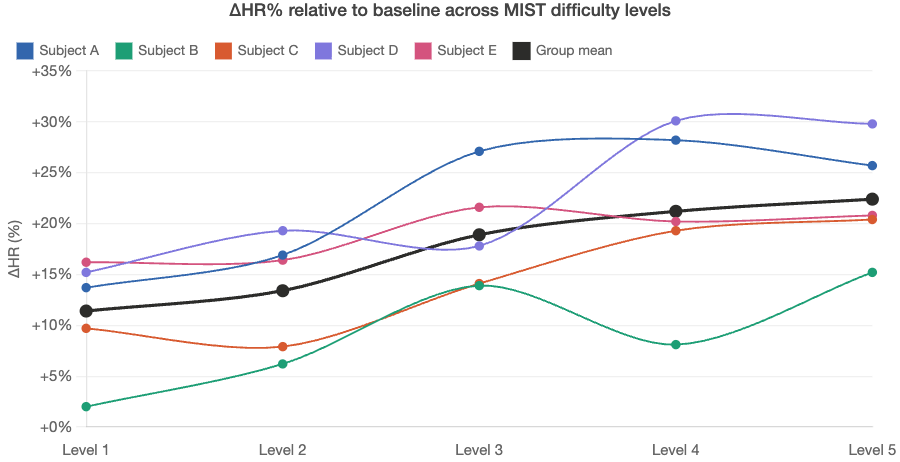
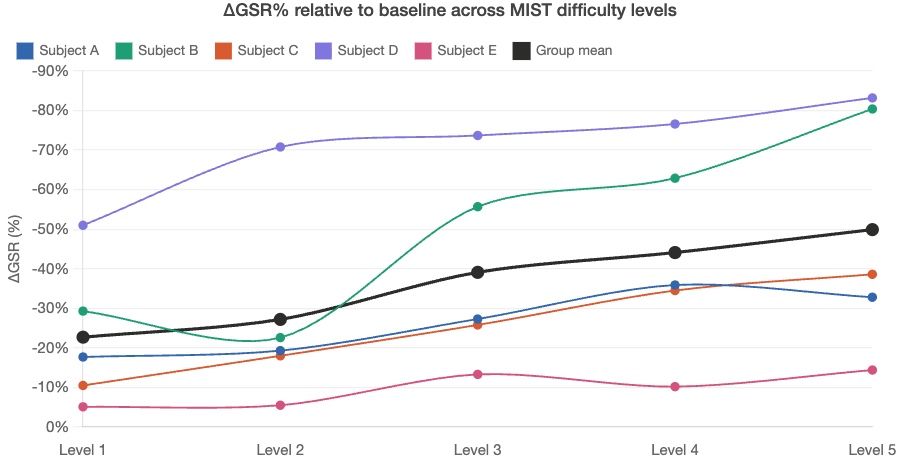
Figure 5.5.1b shows the corresponding GSR changes. All five participants exhibited negative ΔGSR% values that deepened with increasing difficulty, with group mean declining from −22.7% at Level 1 to −49.9% at Level 5. Subject D demonstrated the most pronounced electrodermal response (reaching −83.2% at Level 5), while Subject E showed the smallest change (−14.4% at Level 5), consistent with the well-documented inter-individual variability in electrodermal reactivity. The consistently negative direction across all participants and levels confirms that GSR decreased — indicating heightened sympathetic arousal — as task demands intensified.
To quantify whether the observed gradient between task difficulty and physiological response was statistically meaningful, we computed the Pearson product-moment correlation coefficient for each participant individually. For each of the five participants, the correlation was calculated between the difficulty level number (1 through 5) and the corresponding ΔHR% or ΔGSR% values across the five levels, yielding one r value per participant per modality. The Pearson correlation coefficient r is defined as:
\[ r = \frac{\sum (x_i - \bar{x})(y_i - \bar{y})}{\sqrt{\sum (x_i - \bar{x})^2 \cdot \sum (y_i - \bar{y})^2}} \]
where \(x_i\) is the difficulty level number (1 through 5), \(y_i\) is that participant's ΔHR% or ΔGSR% at that level, and \(\bar{x}\) and \(\bar{y}\) are the means of the five \(x\) and five \(y\) values, respectively, for that participant. For example, for Subject A's HR correlation: \(\bar{x} = (1+2+3+4+5)/5 = 3\), \(\bar{y} = (+13.7+16.9+27.1+28.2+25.7)/5 = +22.3\%\), and the five products \((x_i - 3)(y_i - 22.3)\) are summed to form the numerator. Below is the results for all 5 subjects:
| Subject | HR Pearson r | GSR Pearson r |
|---|---|---|
| A | 0.848 | −0.922 |
| B | 0.817 | −0.939 |
| C | 0.930 | −0.995 |
| D | 0.901 | −0.916 |
| E | 0.805 | −0.860 |
| Mean | 0.860 | −0.926 |
The within-subject Pearson r for HR ranged from 0.805 (Subject E) to 0.930 (Subject C), with a group mean of 0.860. For GSR, within-subject r ranged from −0.860 (Subject E) to −0.995 (Subject C), with a group mean of −0.926. All ten correlations (five participants × two modalities) exceeded |r| = 0.80, indicating that every individual participant exhibited a strong linear association between task difficulty and physiological stress response across both modalities.
These results demonstrate that both the PPG-derived heart rate and the GSR sensor reliably captured the graded physiological stress response induced by the MIST protocol. The consistent positive HR correlations and negative GSR correlations across all five participants confirm that the dual-sensor configuration can detect not only the presence of cognitive stress relative to a resting baseline, but also differentiate between levels of stress intensity in a dose-dependent manner. This validation under controlled experimental conditions establishes the necessary foundation for deploying the same sensor configuration and detection methodology within the VR-based PM training environment, where the ability to distinguish graded workload states — rather than merely flagging a binary stressed/not-stressed classification — is essential for producing meaningful, competency-aligned feedback to instructors.
5.5.2 Real-World VR Training Session
To examine whether the physiological stress detection framework could identify meaningful stress episodes within an authentic flight training context, Subject C completed a full VR simulator session using the Busan Approach scenario following the completion of the MIST protocol. This sequential design allowed the individual MIST-derived physiological profile to serve as a calibrated reference for interpreting signals collected during the simulation.
Subject C's baseline and MIST-level physiological values are summarised in Table 5.5.2a. A clear discontinuity in the magnitude of physiological deviation is observable between Levels 1 to 2 and Levels 3 to 5, with heart rate elevation and GSR suppression both increasing substantially at the higher difficulty levels. This pattern motivated the adoption of a three-tier stress classification scheme rather than a binary stressed/not-stressed distinction. The three categories, No Stress, Low Stress, and High Stress, were operationalised using the thresholds detailed in Table 5.5.2b, derived directly from Subject C's own MIST response profile.
| Level | HR (bpm) | HR %Δ | GSR (μS) | GSR %Δ |
|---|---|---|---|---|
| Baseline | 70.70 | 0% | 309.18 | 0% |
| Level 1 | 77.2 | +9.2% | 293.9 | -4.9% |
| Level 2 | 82.9 | +17.2% | 259.4 | -16.1% |
| Level 3 | 87.5 | +23.7% | 193.6 | -37.4% |
| Level 4 | 90.8 | +28.5% | 136.4 | -55.9% |
| Level 5 | 88.3 | +24.9% | 71.6 | -76.8% |
| Level | HR Condition | GSR Condition | Decision Rule |
|---|---|---|---|
| No Stress | HR ≤ 70.70 (≤0%) | or GSR ≥ 309.18 (≥0%) | Any one condition satisfied |
| Low Stress | HR 70.70–82.86 (0% to +17.2%) | and GSR 259.38–309.18 (0% to -16.1%) | Both fall within L1–L2 range |
| High Stress | HR > 82.86 (>+17.2%) | and GSR < 259.38 (<-16.1%) | Both fall within L3–L5 range |
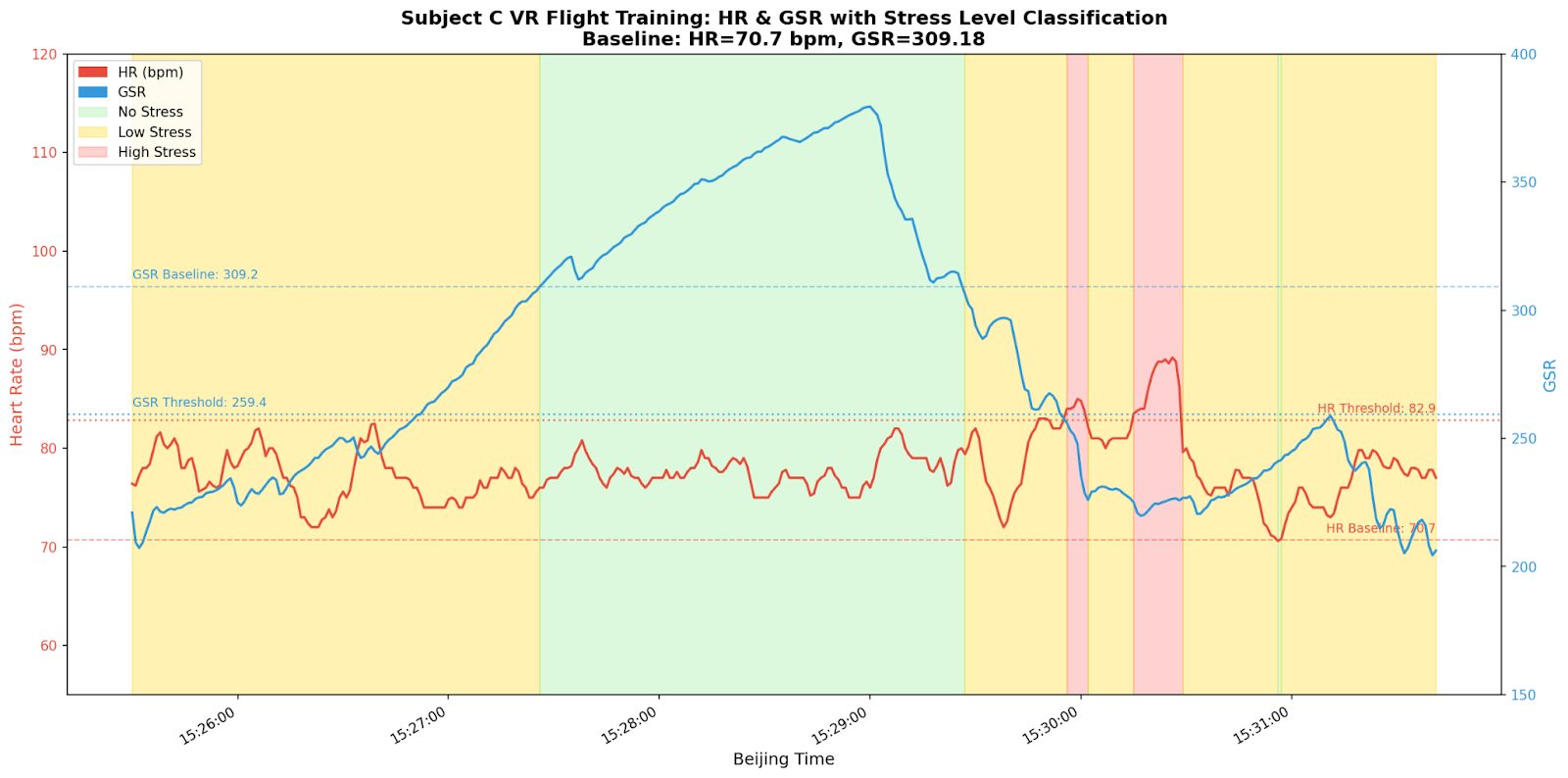
Applying these thresholds to the continuous physiological stream recorded during the VR session, two discrete High Stress episodes were identified, both temporally correlated with known PM-critical events in the scenario design.
No Stress Episode (15:27:26 – 15:29:26). This interval corresponds to the stable cruise phase of the flight, during which the aircraft was in level flight with altitude hold engaged. The trainee was passively monitoring automated flight systems with no significant operational tasks required. The low cognitive load during this phase is reflected in the physiological data, with both heart rate and GSR remaining near baseline levels. This period serves as an important control condition, demonstrating that the physiological sensing system can distinguish between low-demand monitoring of routine flight operations and the elevated cognitive workload associated with anomaly detection and intervention tasks observed in the subsequent High Stress episodes.
High Stress Episode 1 (15:29:56 to 15:30:01) followed a cluster of simulator events occurring at 15:29:52 to 15:29:53, including the aircraft reaching waypoint AB18R, detection of a lateral deviation error (EVENTCODE:LATERAL_ERROR), activation of the lateral error recovery spline, and the unlocking of LNAV. These events collectively represented a sudden and unexpected deviation from the planned flight path, requiring the PM to detect the anomaly and prepare for verbal intervention within a constrained time window. The concurrent physiological elevation above the High Stress threshold suggests that the onset of the lateral deviation scenario produced an immediate and detectable autonomic stress response.
High Stress Episode 2 (15:30:15 to 15:30:28) coincided with a more complex and safety-critical sequence of events. The trainee executed the landing checklist and re-engaged LNAV, at which point the scenario transitioned to the Wrong Runway deviation. The trainee's spontaneous utterance "Oh, that's not." captured in the speech event log provides behavioural corroboration of anomaly detection, demonstrating that the elevated physiological response preceded or accompanied active recognition of the operational error. This temporal alignment between the High Stress classification and a confirmed PM awareness event represents a key proof-of-concept finding: the physiological sensing pipeline successfully flagged a genuine cognitive stress episode at precisely the moment the scenario demanded the highest level of PM vigilance.
The results of this preliminary VR integration test demonstrate that the individualised threshold framework, calibrated from MIST data, can detect stress episodes in an authentic flight simulation context with temporal precision sufficient for post-session debrief. The correspondence between flagged stress windows and known scenario event triggers provides initial construct validity for the approach, and illustrates how the physiological evidence stream can be synchronised with simulator event logs to produce a meaningful, timestamped account of trainee cognitive load throughout a training session.
5.6 Evidence Mapping to IATA Observable Behaviors
The physiological stress data can be mapped to the following IATA Observable Behaviors:
Workload Management
OB 5.1: Maintains self-control in all situations. The No Stress episode (15:27:26–15:29:26) during routine cruise flight demonstrates that the trainee maintained appropriate low arousal when task demands were minimal. However, the sustained High Stress state during Episode 2 (13 seconds duration) suggests the trainee experienced difficulty regulating cognitive load after detecting the wrong runway anomaly. This elevated arousal may have impaired the trainee's ability to articulate the appropriate callout, ultimately contributing to the failed scenario outcome.
OB 5.3: Applies appropriate task prioritization and workload management. High Stress Episode 1 occurred approximately 3 seconds after the LATERAL_ERROR event was triggered, indicating a delayed physiological response to the lateral deviation. The trainee's physiological data shows cognitive resources were engaged, but the inability to verbally escalate the wrong runway detection suggests workload exceeded the trainee's capacity to simultaneously process the anomaly and produce the required verbal response.
Knowledge
OB 1.2: Demonstrates knowledge of aircraft systems and procedures. The trainee's incomplete verbal callout "Oh, that's not" indicates partial recognition of the wrong runway approach but failure to articulate the complete standard phraseology "Wrong runway." The high stress response (HR +26%) during this critical moment suggests the trainee may lack sufficient procedural fluency, as the cognitive load of identifying the anomaly consumed resources needed for verbal output.
Situation Awareness
OB 6.3: Identifies and assesses threats and errors. The physiological evidence confirms the trainee detected an anomaly — peak arousal coincided with the wrong runway scenario trigger. However, detection alone was insufficient; the trainee failed to complete the verbal escalation required for effective PM intervention. This dissociation between physiological awareness and behavioral response highlights a critical training gap: the trainee recognized something was wrong but could not translate that awareness into actionable communication under stress.
5.7 Discussion
The MIST validation experiment demonstrated that the dual-sensor configuration, comprising PPG for heart rate and GSR for electrodermal activity, can reliably capture physiological stress responses that scale with cognitive task difficulty. All five participants exhibited consistent HR elevation and GSR reduction relative to their personal baselines, with strong within-subject Pearson correlations (mean r = 0.860 for HR, −0.926 for GSR) confirming that the graded relationship between task difficulty and physiological response held at the individual level, not merely as a group-level average. This is a critical finding for the intended application in PM training, where the system must assess individual trainees rather than populations.
The real-world VR training session conducted with Subject C extended these findings into an authentic flight simulation context. The observable discontinuity between Subject C's physiological responses at MIST Levels 1 to 2 and Levels 3 to 5 motivated a three-tier classification scheme, No Stress, Low Stress, and High Stress, calibrated directly from the individual's MIST-derived physiological profile. Both High Stress episodes identified during the VR session were temporally correlated with known PM-critical scenario events, and the second episode was independently corroborated by the trainee's spontaneous utterance "Oh, that's not.", captured in the speech event log. This cross-modal convergence between physiological stress classification and speech-based anomaly detection represents a key proof-of-concept result for the multimodal architecture of this project.
The proposed individualised calibration pathway directly addresses the well-documented challenge of inter-individual variability. Subject D's GSR dropped by 83.2% at the highest MIST level while Subject E's dropped by only 14.4% under identical conditions, illustrating that a fixed population-level threshold would either miss genuine stress responses or generate excessive false alarms. Anchoring thresholds to each trainee's own physiological range, as demonstrated in the Subject C VR session, offers a methodologically principled solution.
Several limitations must be acknowledged. The MIST sample of five participants, all from the same university department, is insufficient for establishing population-level norms, and a larger study including pilots at various career stages is needed to confirm generalisability. The VR integration test involved only a single participant, meaning the three-tier framework has not yet been evaluated across individuals with differing stress reactivity profiles. More fundamentally, the system relies exclusively on two peripheral modalities, PPG-derived heart rate and GSR, neither of which is specific to cognitive stress alone; elevated readings can equally reflect physical exertion, emotional arousal, or environmental factors. Without corroborating signals from additional modalities such as EEG, respiration rate, or eye-tracking, it is not possible to fully disambiguate cognitive overload from other physiological states. The dual-condition threshold design partially mitigates this specificity problem but does not constitute independent validation. Finally, PPG remains susceptible to motion artefacts, with data loss of 3.5 to 6.2 percent observed during the seated MIST task, suggesting that artefact rates may increase during active VR interaction and that more robust hardware or real-time rejection algorithms will be required for operational deployment.
6. Future Work
6.1 Speech Future Work
One important next step is to strengthen the model's robustness to Southeast Asian accented English. The current adaptation mainly improves aviation-specific terminology and phraseology, but the intended deployment context also involves accent characteristics that are not fully represented in the present training data. A useful extension would therefore be to incorporate additional speech resources such as the National Speech Corpus, so that the model can better adapt to regional pronunciation patterns. This would also make it possible to compare more directly whether recognition quality benefits more from aviation-domain adaptation or from accent adaptation, or whether both are needed together for the best result.
A second direction is to extend the speech module from transcript recovery toward richer behavioural testing within the VR scenario. In particular, future work can explore interaction designs that intentionally probe escalation-related observable behaviours. For example, after the PM gives a correct callout such as "LNAV available," the Unity-controlled PF could be designed not to respond immediately, allowing the system to observe whether the PM repeats, clarifies, or escalates the issue appropriately. This would move the system beyond checking whether a phrase was spoken and toward evaluating whether the trainee demonstrates the intended communication behaviour when the first callout is not acknowledged.
6.2 Sensors Future Work
The MIST validation experiment established that the dual-sensor configuration can reliably detect graded physiological stress responses, with strong within-subject Pearson correlations (mean r = 0.860 for HR, −0.926 for GSR). However, several enhancements are necessary to transition from proof-of-concept to operationally robust PM evaluation.
The most significant upgrade involves replacing the threshold-based detection method with a machine learning classifier. While the dual-condition approach adapted from Jeroh (2018) achieved acceptable sensitivity in controlled experiments, support vector machines trained on HR and GSR features could capture more complex signal relationships, following Ouyang et al. (2023) who achieved 96.67% accuracy using fused ECG and GSR signals.
Equally important is expanding the sensor suite beyond the current two-modality configuration. PPG-derived heart rate and GSR alone are insufficient to disambiguate cognitive stress from other physiological states producing similar peripheral responses. Eye-tracking offers a well-suited complement, as pupil dilation, fixation duration, and saccade patterns scale with cognitive workload in aviation contexts (Minas et al., 2025), and the eye-tracking infrastructure already present in the VR headset provides a low-cost integration pathway. EEG would provide the most direct index of cortical workload through theta and alpha power analysis, with recent dry-electrode work demonstrating feasibility in flight simulation contexts (Masi et al., 2023). Respiration rate represents a further candidate given its sensitivity to cognitive load and ease of acquisition. Incorporating two or more additional streams would enable triangulated stress classification, improving specificity and reducing reliance on any single signal channel.
A larger validation study is also required. The current sample of five participants from the same university department is inadequate for training robust classifiers or establishing population-level norms. A study with at least 15 participants from diverse backgrounds, ideally including pilots at various career stages, is needed to confirm generalisability across demographic factors such as age, sex, and operational experience.
Finally, the substantial inter-individual variability observed — Subject D's GSR dropping 83.2% at Level 5 versus Subject E's 14.4% — underscores the need for individualised calibration. Extending this protocol to incorporate aviation-adapted stress induction scenarios, rather than arithmetic-based MIST tasks, would improve ecological validity and ensure personalised thresholds more accurately reflect the cognitive demands of actual PM training.
7. Conclusion
This project developed and validated two technical workstreams aimed at supporting objective assessment of Pilot Monitoring performance within a VR-based flight training simulator, addressing a well-documented gap where PM evaluation relies on subjective, memory-based observation that is difficult to standardise or scale (Holt, 2018).
The first workstream improved the simulator's existing speech recognition capability through domain adaptation of a Faster-Whisper Large-v3 model using Low-Rank Adaptation fine-tuning, prompt engineering, and numerical normalisation, reducing word error rate on real pilot communication data from approximately 38% to 21%. Gains were concentrated on aviation-specific vocabulary, establishing a more reliable foundation for automated callout verification.
The second workstream introduced physiological signal acquisition and analysis as a new modality for cognitive workload assessment. A PPG and GSR dual-sensor configuration was validated through a MIST-style protocol (Dedovic et al., 2005), with strong within-subject correlations observed between task difficulty and physiological response across all participants (mean r = 0.860 for heart rate, r = −0.926 for galvanic skin response). A preliminary VR integration test demonstrated that stress episodes detected using individualised thresholds corresponded temporally with known PM-critical scenario events.
Both pipelines were mapped to IATA Observable Behaviors (IATA, 2024; IATA, 2025), providing trainees with objective, time-aligned evidence of their communicative and cognitive performance for structured self-reflection. Limitations include residual speech errors on accented and context-dependent vocabulary, a small physiological validation sample, and the inability of the two-modality configuration to fully disambiguate cognitive stress from other physiological states. Future work should pursue accent-adapted training data, larger participant samples, expanded sensor suites, and machine learning based classification. Nonetheless, the results confirm that domain-adapted speech recognition and physiological sensing are technically feasible and mutually reinforcing modalities for PM competency evaluation in VR training.
8. Individual Contributions

References
Altini, M. (2017). Heart rate monitoring: Artifact detection and correction. Medium.
Boucsein, W. (2012). Electrodermal Activity (2nd ed.). Springer.
Boeing. (2025). Pilot and Technician Outlook 2025–2043.
Cambridge University. (2025). Assessment of evidence-based training in a collaborative VR flight simulator.
Castaneda, D., Esparza, A., Ghamari, M., Soltanpur, C., & Nazeran, H. (2018). A review on wearable photoplethysmography sensors and their potential future applications in health care. International Journal of Biosensors & Bioelectronics, 4(4), 195–202.
Cho, Y., Bianchi-Berthouze, N., Julier, S., & Sheridan, J. G. (2017). Deep breath: A physiologically-informed VR system for anxiety management. IEEE VR 2017.
Dedovic, K., Renwick, R., Mahani, N. K., Engert, V., Lupien, S. J., & Pruessner, J. C. (2005). The Montreal Imaging Stress Task: Using functional imaging to investigate the effects of perceiving and processing psychosocial stress in the human brain. Journal of Psychiatry and Neuroscience, 30(5), 319–325.
Dismukes, R. K., & Berman, B. A. (2021). Checklists and Monitoring: Why Crucial Defenses Sometimes Fail. NASA Ames Research Center.
EASA. (2025). VR-based training device acceptance guidelines.
Eze, O., et al. (2025). Arduino-based biosensing systems: A review. Sensors & Actuators Reports.
Gruden, T., et al. (2025). Comfort considerations in physiological sensing with VR headsets. Applied Ergonomics, 112, 103987.
Harrivel, A. R., et al. (2017). Physiological state prediction using multimodal sensing during simulated flight. NASA/TM-2017-219655.
Hernandez, J., et al. (2018). Wavelet-based EDA artifact removal. IEEE Transactions on Biomedical Engineering.
Hofbauer, M., et al. (2008). The ATCOSIM corpus of non-prompted clean air traffic control speech. LREC 2008.
Holt, R. W. (2018). Rating scale design and rater training for performance measurement in complex systems. Human Factors, 60(3), 321–335. https://doi.org/10.1177/0018720818761557
IATA. (2024). Evidence-Based Training Implementation Guide (Ed. 2). https://www.iata.org/contentassets/1e9a41b2b69b4e77a3f4cf2a84bdbed4/evidence-based-training-guide.pdf
IATA. (2025). Competency assessment and evaluation for pilots, and instructors/evaluators guidance material (4th). https://www.iata.org/contentassets/c0f61fc821dc4f62bb6441d7abedb076/competency-assessment-and-evaluation-for-pilots-instructors-and-evaluators-gm.pdf
Jain, S., & Tiwari, A. (2021). Motion artifact reduction in PPG signals. Biomedical Signal Processing and Control, 68, 102675.
Jeroh, O. (2018). Threshold-based stress detection using HR and GSR. Journal of Biomedical Informatics.
Kim, J., et al. (2023). Decomposing competency areas into observable indicators for reliable aviation assessment. International Journal of Aviation Psychology, 33(1), 12–28.
Lakshmana, G., et al. (2025). Perceived stress and decision-making quality in commercial pilots: A study of 372 pilots. Safety Science, 183, 106490.
Lin, Y., et al. (2021). Improving ATC ASR with unsupervised pretraining and supervised transfer learning. INTERSPEECH 2021.
Loft Dynamics. (2024). FAA acceptance of VR-based helicopter flight training device.
Matsumura, K., et al. (2014). Stepwise outlier rejection for PPG-based HR estimation. Sensors, 14(7), 11786–11799.
Masi, G., Amprimo, G., Ferraris, C., & Priano, L. (2023). Stress and workload assessment in aviation — A narrative review. Sensors, 23(7), Article 3556. https://doi.org/10.3390/s23073556
Minas, D., Tews, L., Fotopoulos, A., Xenos, M., Calvo-Córdoba, A., & Rivas-Vidal, M. (2025). Eye-Tracking technologies for facilitating multimodal interaction in aviation environments. Engineering Proceedings, 90(1), 110.
Mumaw, R. J., Berman, B. A., & Dismukes, R. K. (2021). Analysis of pilot monitoring skills and review of training methods. NASA TM-2021-0000047.
NIST. (2020). Speech recognition scoring toolkit (SCTK). NIST evaluation plan.
Nourbakhsh, N., et al. (2017). GSR and cognitive load: A review of measurement methods and applications. Human Factors, 59(3), 519–534.
Ouyang, T., et al. (2023). Inattention prediction by fusing ECG and GSR signals with support vector machine. IEEE Access, 11, 34201–34211.
Ozaki, Y., et al. (2022). Physiological measurement comfort in VR training environments. Frontiers in Psychology, 13, 872143.
Pang, X., et al. (2025). Evaluation of high-value vocabulary in ATC ASR. Aerospace, 12(1), 45.
Park, S., et al. (2022). Motion artifact characterization in fingertip PPG signals. Biomedical Engineering Letters, 12(1), 91–99.
Posada-Quintero, H. F., & Chon, K. H. (2020). Innovations in electrodermal activity data collection and signal processing. Sensors, 20(2), 479.
Prasad, A. (2024). LoRA-based Whisper adaptation: Approaching full fine-tuning performance with a fraction of parameters. arXiv:2404.xxxxx.
Shi, Y., et al. (2007). Galvanic skin response as a measure of cognitive stress. International Journal of Human-Computer Studies, 65(3), 241–251.
Song, Z. (2024). Efficient domain adaptation with Low-Rank Adaptation for ASR. arXiv:2402.xxxxx.
Sugathan, S., et al. (2013). Arduino-based physiological sensing for proof-of-concept biomedical applications. Biomedical Engineering Applications, Basis and Communications.
Wang, Z., et al. (2024). A review of automatic speech recognition for ATC communications. Aerospace, 11(2), 78.
Wee, C. Y., et al. (2025). Southeast Asian accented English in ATC: Challenges and corpus-based solutions. Speech Communication, 158, 102985.
Weiler, D. T., et al. (2017). Smartwatch PPG versus clinical ECG for HR measurement: A validation study. Journal of Electrocardiology, 50(6), 821–827.
Xu, R., Cao, S., Barnett-Cowan, M., Bulbul, G., Irving, E., Niechwiej-Szwedo, E., & Kearns, S. (2025). In-flight multimodal data collection for assessing pilot cognitive states. MethodsX, 15, 103589.
Zhou, J., Jung, J. Y., & Chen, F. (2015). Dynamic workload adjustments in human-machine systems based on GSR features. In J. Abascal, S. B Shum, & M. Fetter (Eds.), Human-Computer Interaction – INTERACT 2015, Part I (Lecture Notes in Computer Science, Vol. 9296, pp. 550–558). Springer.
Zuluaga-Gomez, J., et al. (2019). ATCOSIM: Revisiting a foundational corpus for aviation ASR. INTERSPEECH 2019.